Silniki Krokowe
Spis treści :
- Podział silników krokowych.
a)Silnik krokowy o zmiennej reluktancji.
b)Silniki krokowy z magnesem trwałym.
c)Silnik krokowy hybrydowy.
2.Podział silników ze względu na sposób sterowania.
a)Silnik bipolarny.
b)Silnik krokowy unipolarny.
Teoria :
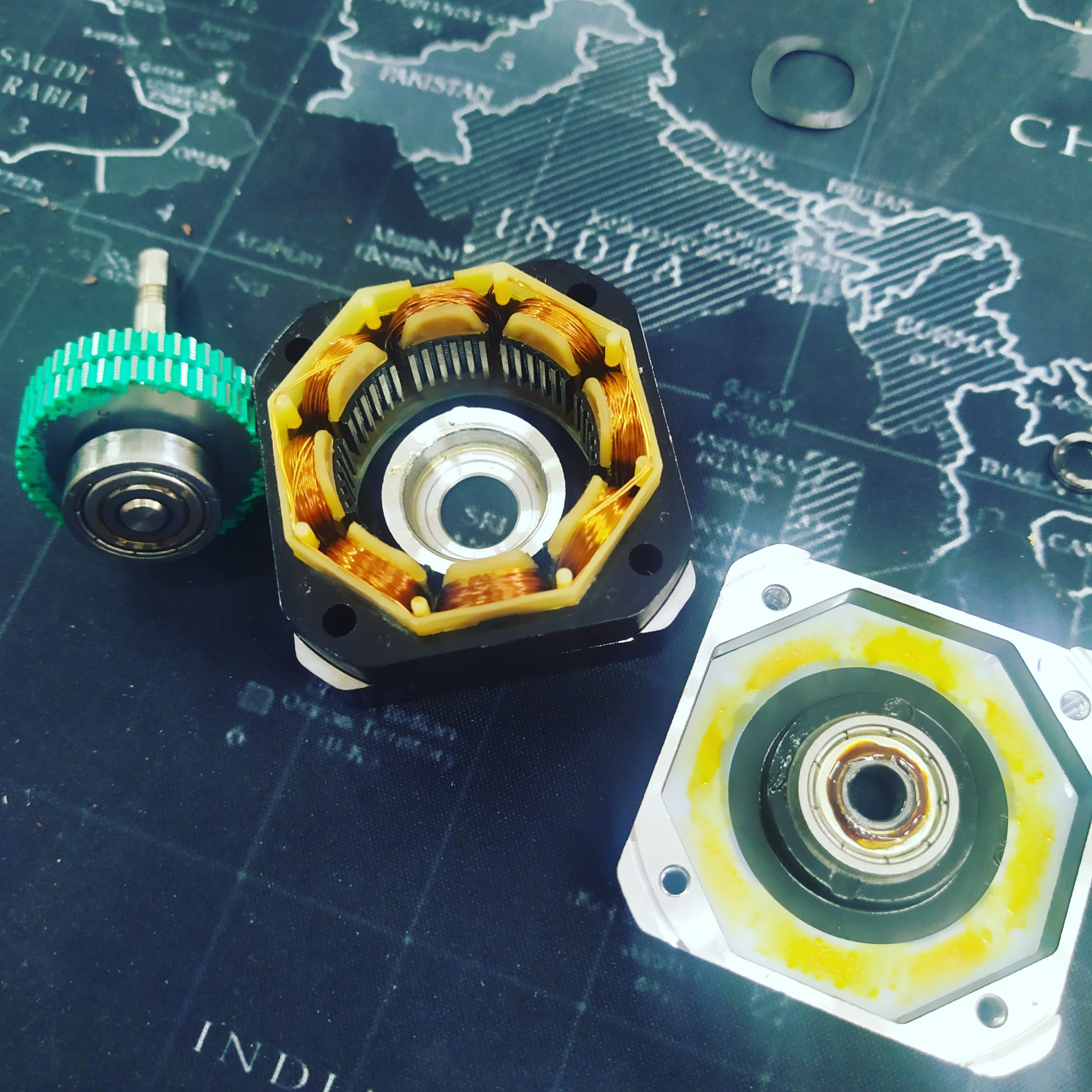
Silnik Krokowy
W przeciwieństwie do innych silników prądu stałego czy też przemiennego, silniki krokowe wymagają zasilania sekwencyjnego .By wprawić je w ruch należy wysłać sekwencję impulsów na poszczególne cewki silnika krokowego. Otrzymujemy dzięki temu ruch obrotowy o ściśle ustalonym kącie.
1.Podział silników krokowych .
Rozróżniamy 3 podstawowe ze względu na budowę silniki :
- silnik z magnesem trwałym,
- silnik o zmiennej reluktancji,
- silnik hybrydowy.
a) Silnik krokowy o zmiennej reluktancji.

Wśród jednosegmentowych silników krokowych o wirniku reluktancyjnym rozróżnić można takie, w których na jeden biegun stojana przypada jeden ząb wirnika i takie, w których na jeden biegun stojana przypada kilka zębów wirnika. Obydwie odmiany mogą być wykonana w wariancie symetrycznym bądź niesymetrycznym.
W budowie symetrycznej uzwojenia dwóch przeciwległych biegunów tworzą pasmo natomiast budowa niesymetryczna charakteryzuje się tym, że całe uzwojenie jednego pasma jest umieszczone na jednym biegunie. Działanie silnika skokowego o wirniku reluktancyjnym opiera się na wykorzystaniu momentu reluktancyjnego. Silnik ten składa się z rotora o wielu zębach wykonanego z miękkiej stali i uzwojonego stojana. Kiedy uzwojenia stojana są zasilane stałym prądem, bieguny namagnesowują się. Ruch pojawia się na skutek przyciągania zębów rotora przez zasilane bieguny stojana.
b) Silniki krokowy z magnesem trwałym.

Ma konstrukcję stojana podobną do konstrukcji silnik reluktancyjny ze zmiennym stosem. Wirnik składa się z biegunów magnesów trwałych ze stali o wysokiej retencji i ma kształt cylindryczny. Koncentrujące uzwojenia na diametralnie przeciwległych biegunach są połączone szeregowo, tworząc dwufazowe uzwojenie na stojanie.
c)Silnik krokowy hybrydowy.
Zasada działania silnika hybrydowego opiera się na interakcji magnetycznej . Magnes trwały umieszczony na wirniku wytwarza jedno biegunowy strumień magnetyczny, który zamyka się w obwodzie magnetycznym: stojan – szczelina powietrzna – wirnik. Po zasileniu uzwojenia stojana, wzbudzony strumień magnetyczny pod jednym biegunem stojana dodaje się do strumienia magnesów trwałych, pod drugim zaś odejmuje się. Wirnik zostaje wprowadzony w ruch tak by osie zębów stojana i wirnika pokryły się.
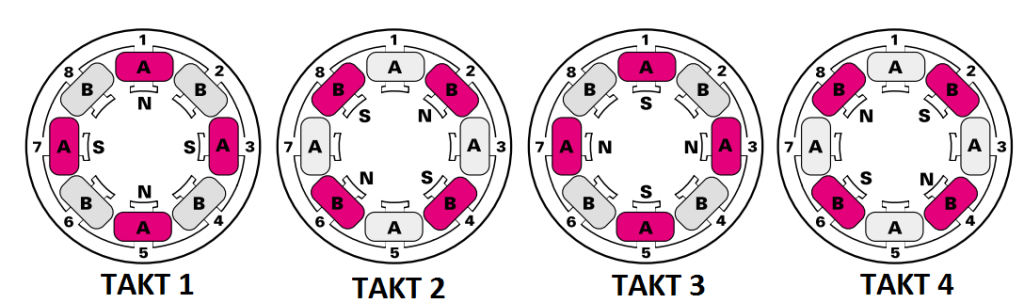
2.Podział silników ze względu na sposób sterowania.
Silniki krokowe ze względu na sposób sterowania dzielimy na: bipolarne 4 wyprowadzenia i unipolarne najczęściej 5 lub 6 wyprowadzeń.
a)Silnik bipolarny.
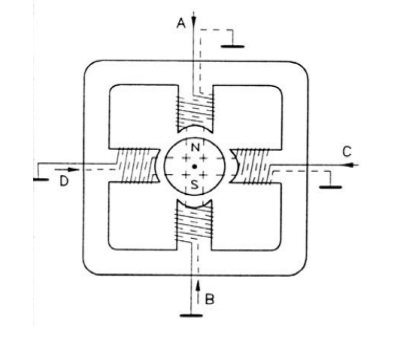
Silnik bipolarny o dwóch fazach ma jedno uzwojenie na fazę. W celu zapewnienia zmiany pola magnetycznego w każdym z uzwojeń musimy zapewnić przepływ prądu w obu kierunkach. W silniku bipolarnym do zmiany pola magnetycznego w rdzeniu wystarcza jeden przełącznik dwupozycyjny lub dwa tranzystory włączane na przemian. Zaletą sterowani bipolarnego jest dobre wykorzystanie momentu obrotowego dzięki temu, że całe uzwojenie jest w stanie prądowym po otrzymaniu impulsu. Ogólnie rzecz biorąc silniki bipolarne wymagają bardziej rozbudowanego układu sterowania.
b)Silnik krokowy unipolarny.
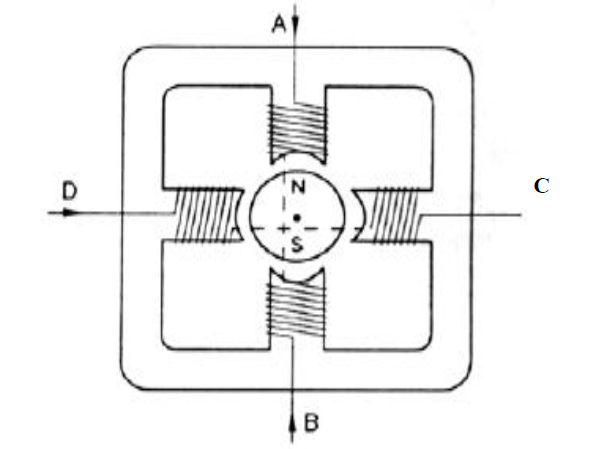
Silnik unipolarny ma jedno uzwojenie z odczepem pośrodku. Istnieją także silniki posiadające po dwa uzwojenia na fazę. Mogą one pracować zarówno w trybie unipolarnym jak i bipolarnym. Przy sterowaniu unipolarnym jednocześnie jest włączona połowa pasma. Sterowanie unipolarne zapewnia przepływ prądu w danym uzwojeniu tylko w jednym kierunku. Zaletą wariantu unipolarnego jest prostszy układ połączeń i mniejsza liczba tranzystorów, wadą zaś to, że jednocześnie pracuje tylko połowa uzwojenia, a zatem nie wytwarza się moment obrotowy o pełnej wartości.
Zalety silnika Krokowego :
- Kąt obrotu silnika jest proporcjonalny do liczby impulsów wejściowych.
- Silnik pracuje z pełnym momentem w stanie spoczynku (o ile uzwojenia są zasilane).
- Precyzyjne pozycjonowanie i powtarzalność ruchu – dobre silniki krokowe mają dokładność ok. 3–5% kroku i błąd ten nie kumuluje się z kroku na krok.
- Możliwość bardzo szybkiego rozbiegu, hamowania i zmiany kierunku.
- Niezawodne – ze względu na brak szczotek. żywotność silnika zależy zatem tylko od żywotności łożysk.
- Zależność obrotów silnika od dyskretnych impulsów umożliwia sterowanie w pętli otwartej, przez co silnik krokowy jest łatwiejszy i tańszy w sterowaniu.
- Możliwość osiągnięcia bardzo niskich prędkości synchronicznych obrotów z obciążeniem umocowanym bezpośrednio na wale silnika.
- Szeroki zakres prędkości obrotowych uzyskiwany dzięki temu, że prędkość jest proporcjonalna do częstotliwości impulsów wejściowych.
- Jedną z najbardziej znaczących zalet silnika krokowego jest możliwość dokładnego sterowania w pętli otwartej. Praca w pętli otwartej oznacza, że nie potrzeba sprzężenia zwrotnego – informacji o położeniu. Takie sterowanie eliminuje potrzebę stosowania kosztownych urządzeń sprzężenia zwrotnego, takich jak enkodery optoelektroniczne.
Wady
- Rezonanse mechaniczne pojawiające się przy niewłaściwym sterowaniu.
- Trudności przy pracy z bardzo dużymi prędkościami.
- W praktyce małe maksymalne obroty: rzędu kilku-kilkuset obrotów na minutę.
- Występuje zjawisko gubienia kroków
- Duży pobór prądu
- Duża emisja ciepła
Przykłady Sterownia silnika Krokowego:
Przykład na ARDUINO + CNC SHIELD
A tu mój stary projekt związany z tym tematem
Źródła :
https://pl.wikipedia.org/wiki/Silnik_krokowy
https://silniki-krokowe.com.pl/informacje-techniczne/silniki-krokowe-zasada-dzialania-2
Tomasz Bojko – „silniki krokowe – układy zasilające – pomiar charakterystyki
dokładnościowej silnika krokowego”
https://winder.github.io/ugs_website/
